一、实验室介绍
海上风电开发不同于陆地风电,其对于技术的依赖性相对更高,标准更为严苛,焊接作为专业技术学科,其在制造领域的各行各业几乎不可或缺。在海上风电的运维当中,焊接是一种极其重要的作业方式。本实验室以自主研发的水陆两用爬壁机器人及其焊接系统为核心设备,通过构建陆上下料切割、AGV搬运、水陆两用爬行机器人及其焊接系统形成一体化的海上风电装备运维机器人实验室。为学生提供了一个融合机械设计、机器人应用、电力电子、自动控制、智能焊接与切割等多学科交叉学习的系统装备平台。通过相应的实训和操作,提升学生对以上学科的实践认知能力,培养学生对水下焊接、机器人应用、维护等实践技能。
二、实验室主要系统构成
本系统主要由水陆两用的机器人焊接系统、大功率机器人等离子弧切割系统、水陆两用爬壁机器人系统、综合控制系统、移动焊接实验平台、实训操作台以及切割机、坡口机等加工设备组成。其中水陆两用爬壁机器人系统核心系统包括水陆两用爬壁机器人、水陆两用焊接机械臂和机器人控制系统。机器人水下焊接系统主要包括水陆两用多功能数字焊接电源,水下潜水送丝装置、局部干法排水装置。
自动焊接作业时,通过水陆两用爬壁机器人作为焊接运动的载体,搭载水陆两用焊接机械臂来实时调节焊枪焊接前的姿态变化,焊接倾角等,以此适应不同的焊接工艺需求;水陆两用多功能数字焊接电源则提供焊接过程中所需要的能量,水下潜水送丝装置与局部干法排水装置结合实现水下焊接工作。
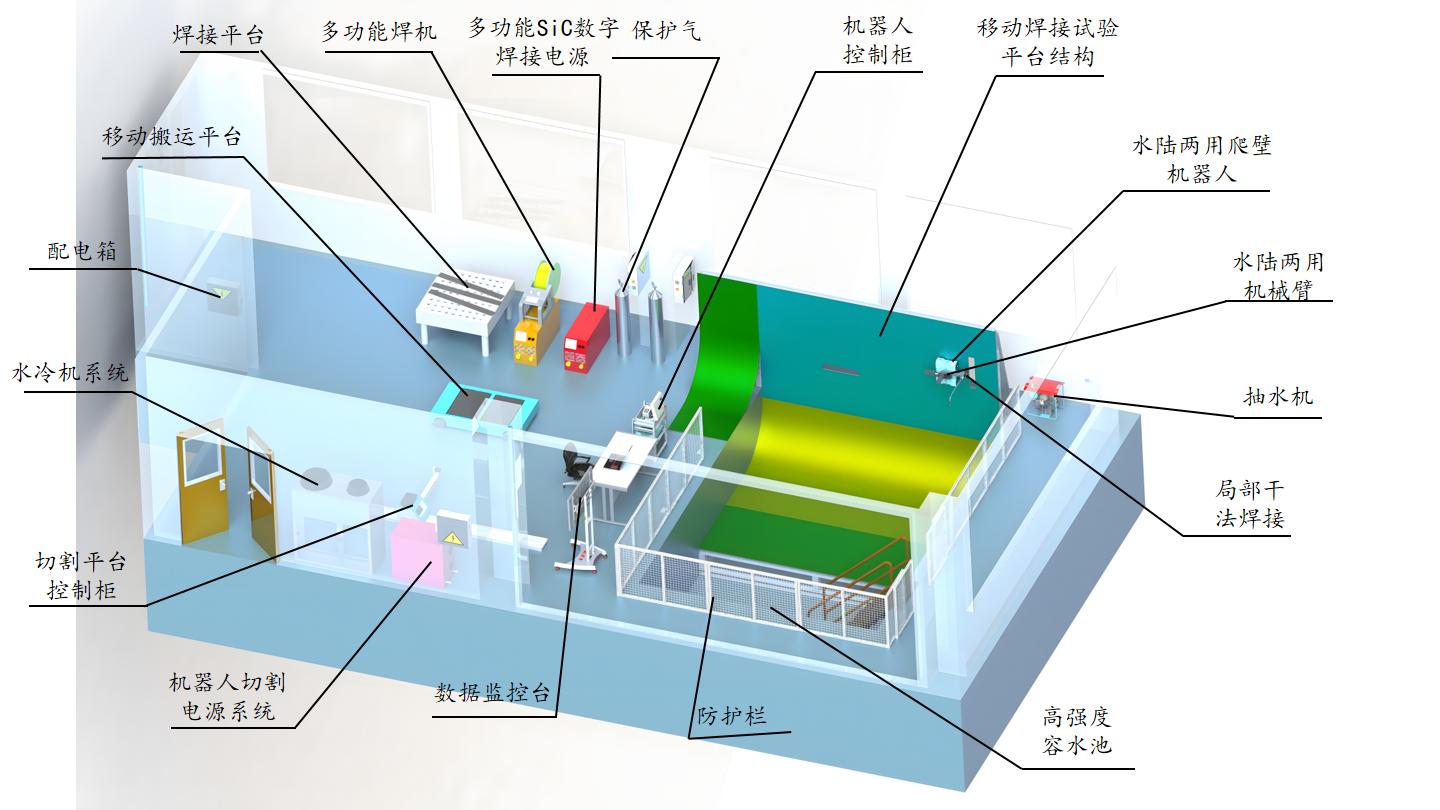
海上风电运维机器人实验室效果图

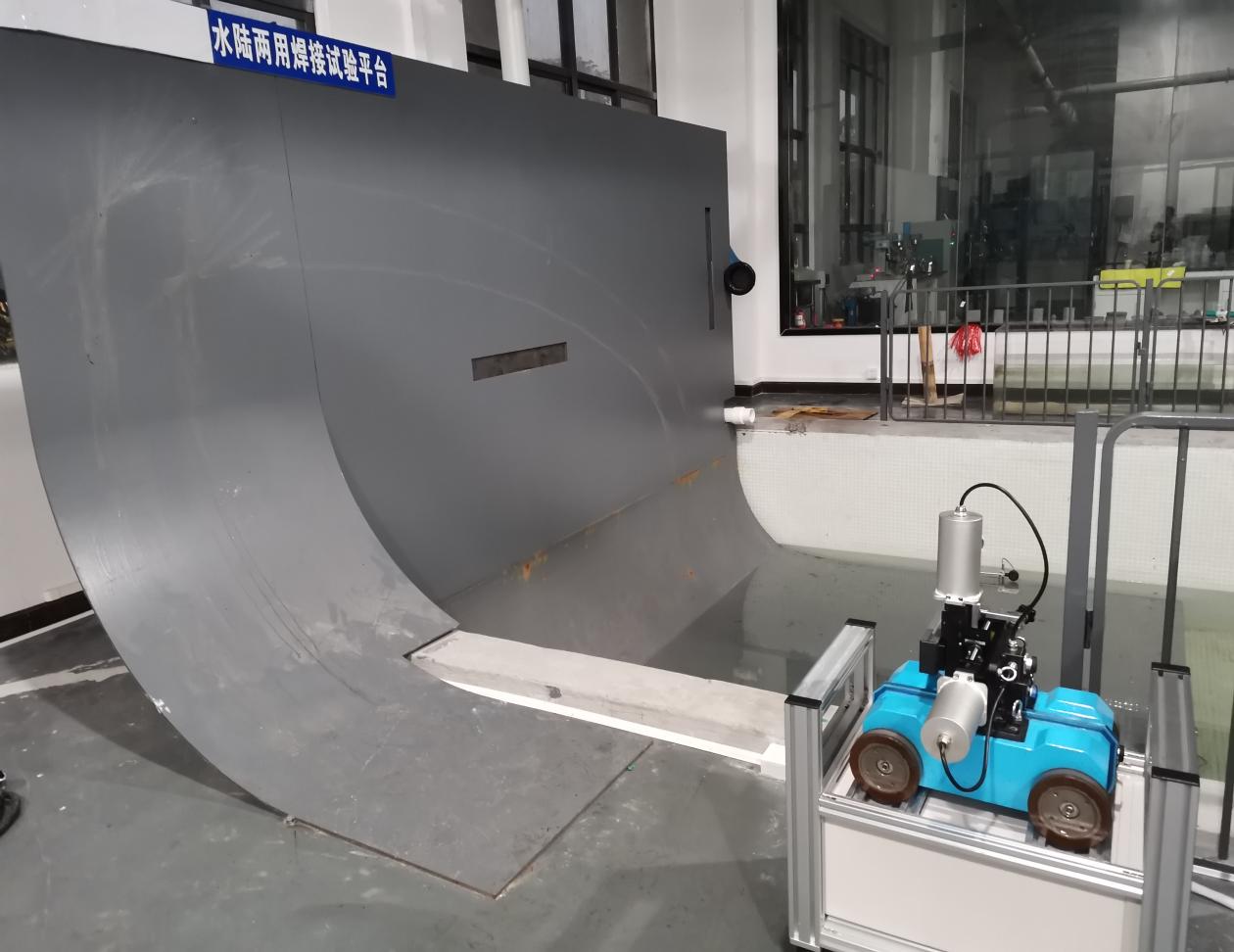
海上风电运维机器人实验室现场图(1)
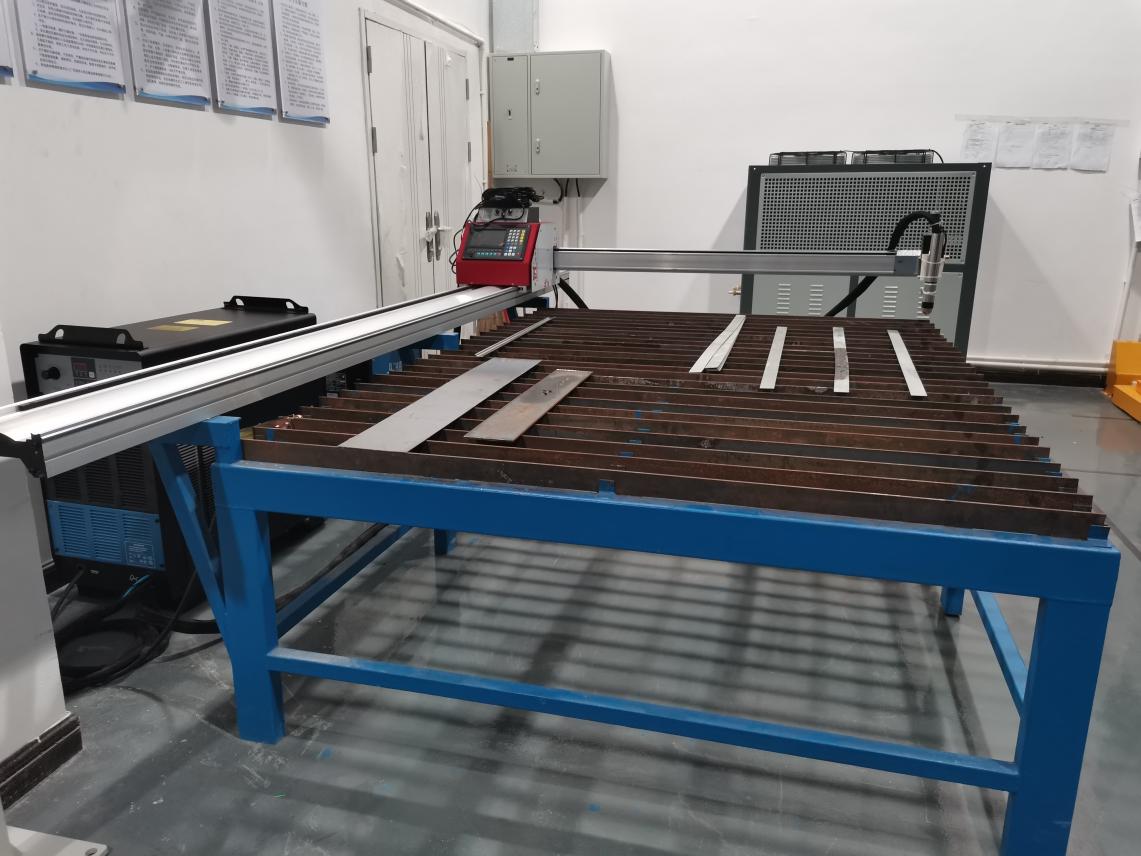
海上风电运维机器人实验室现场图(2)
海上风电运维机器人实验室现场图(3)
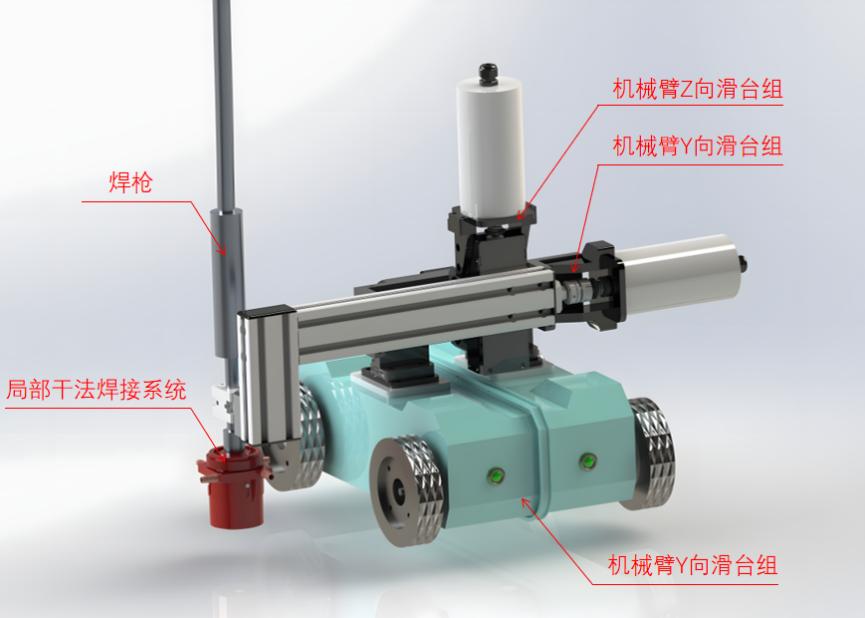
水陆两用爬行焊接机器人外观
三、主要实验实训项目
(1)了解爬壁机器人运动、吸附的工作原理以及爬壁机器人的相关应用;
(2)学习水下爬壁机器人的控制方法和爬壁机器人基本的运动控制编程;
(3)了解多功能焊接与切割电源的工作原理及其工艺特性;
(4)了解陆上和水下环境对焊接工艺的影响以及相关焊接工艺参数的调节方法;
(5)学习等离子切割机及焊接设备的操作方法与相关的理论知识;
(6)学习AGV搬运机器人路径规划和控制技术的应用方法。
